Segue Linha
Pré-requisitos para Montagem
Antes de começar, você precisará ter as seguintes partes já montadas:
- O robô básico montado. Veja como fazer aqui.
Com a parte acima pronta, podemos iniciar a montagem do robô Segue Linha.
Iniciando a Montagem
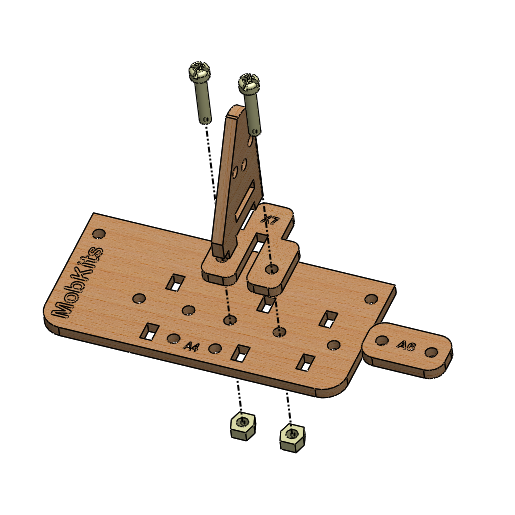
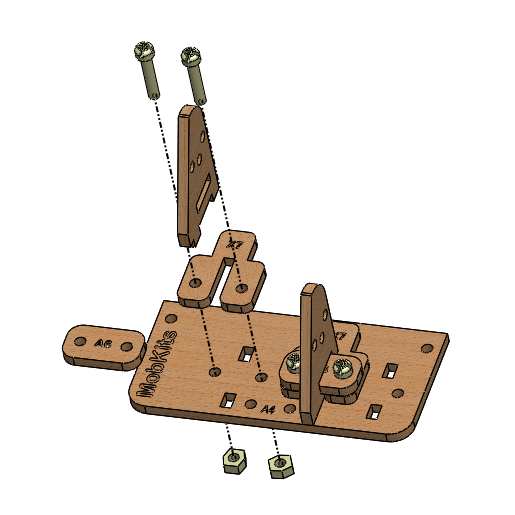
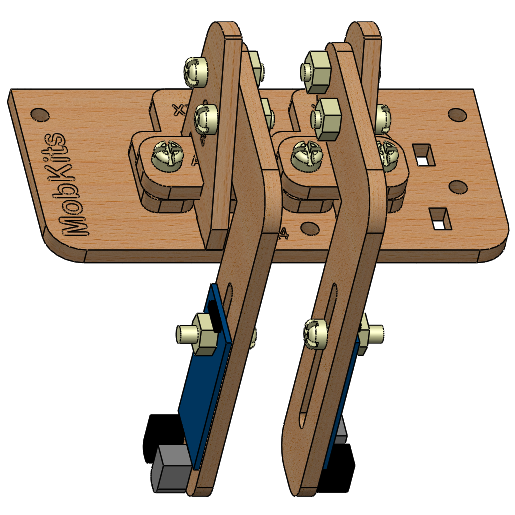
1 Fixação das peças A5 e X7 na base A4
Encaixar as peças A5, A6 e X7 na base A4, utilizando 2 parafusos CP 16mm
e 2 porcas, conforme imagem abaixo.
Se precisar observe o gif abaixo.
Repita o passo anterior para fixar um novo conjunto das mesmas peças na base A4.
Se precisar observe o gif abaixo.
2 Fixação do módulo sensor infravermelho
Fixar o módulo sensor infravermelho na peça E0.
Utilizando 1 parafuso Cp 10mm e 1 porca, conforme imagem abaixo.
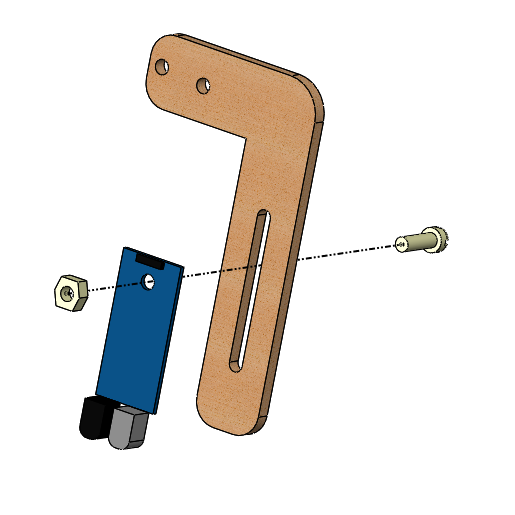
Se precisar observe o gif abaixo.
Repita este passo com outro sensor e outra peça E0. Após finalizar compare com a imagem abaixo.
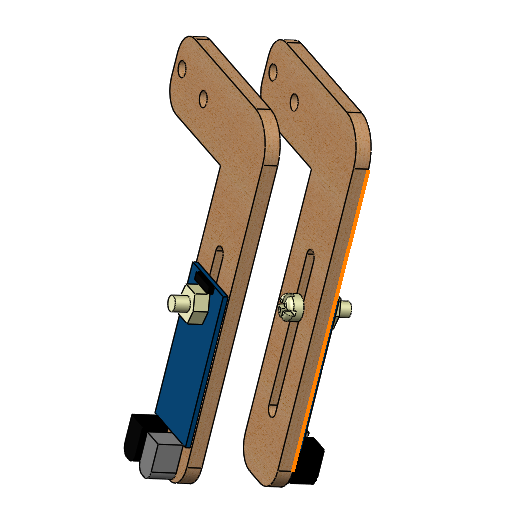
3 Fixação da peça E0 na base A4
Fixar a peça E0 em A5, utilizando dois parafusos CP 10mm
e duas porcas, conforme imagem abaixo.
Se precisar observe o gif abaixo.
Repetir o passo anterior utilizando o outro módulo do sensor e outra E0.
Após finalizar compare com a imagem abaixo.
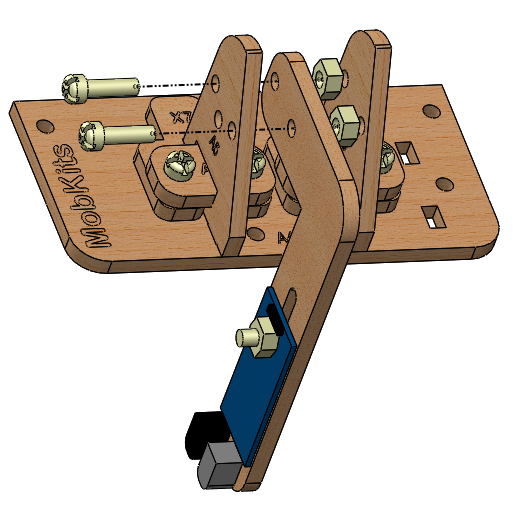
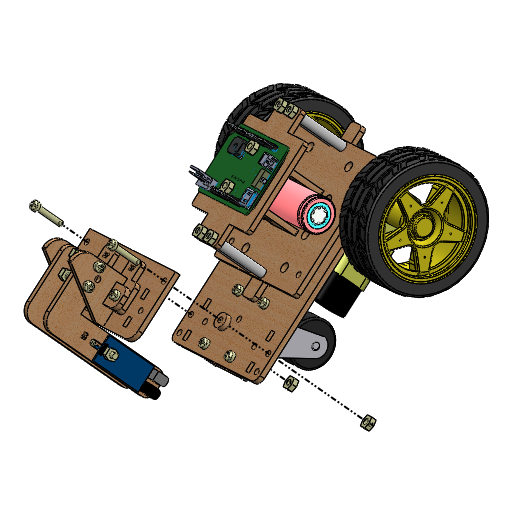
4 Fixação do conjunto A4 na base A0
Fixar o conjunto montado em A4 na base A0 do robô básico, utilizando 2 parafusos CP 12mm
e 2 porcas, adicione 1 peça x1 entre os conjuntos, conforme imagem abaixo.
Se precisar observe o gif abaixo.
5 Conexão dos cabos nos sensores
Conecte o cabo de 3 pinos no módulo sensor infravermelho esquerdo, conforme imagem abaixo.
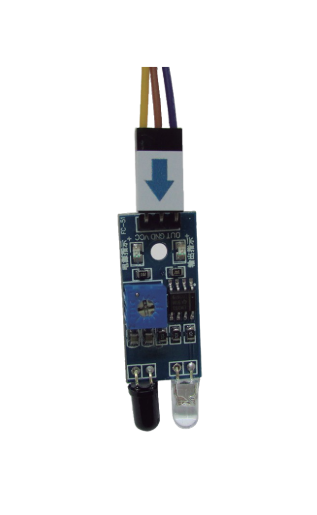
Repita este procedimento para o módulo sensor infravermelho direito.
6 Conexão do sensor esquerdo na placa de controle Mobkits
Identifique o módulo sensor infravermelho que está alinhado com o motor esquerdo (olhe o adesivo no motor).
Conecte a outra extremidade do cabo no conector sensor 2, na placa de controle Mobkits, conforme imagem abaixo.
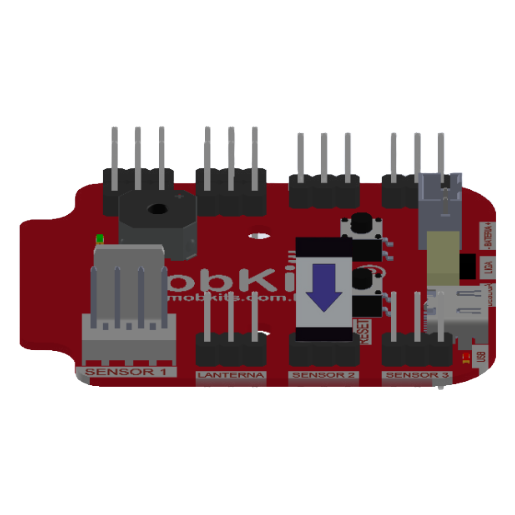
Conexão do cabo no conector sensor 2
7 Conexão do sensor direito na placa de controle Mobkits
Repita este procedimento com o outro módulo sensor infravermelho,que está alinhado com o motor direito (olhe o adesivo no motor).
Faça a conexão do cabo no conector sensor 3, na placa de controle Mobkits, conforme imagem abaixo.
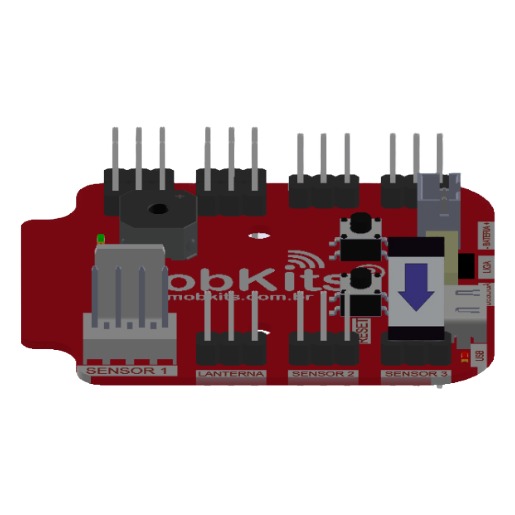
Conexão do cabo no conector sensor 3
8 Controlando pelo aplicativo
Certifique-se de que os cabos dos motores estão conectados e a placa de controle está ligada.
Inicialmente o aplicativo estará desconectado.
Conecte o Wi-Fi do dispositivo a ser utilizado com a placa de controle.
Caso não saiba como realizar esta conexão, consulte o manual que ensina como fazer clicando aqui.
Ao abrir o aplicativo aparecerá a palavra Conectado. A partir disso selecione a montagem desejada.
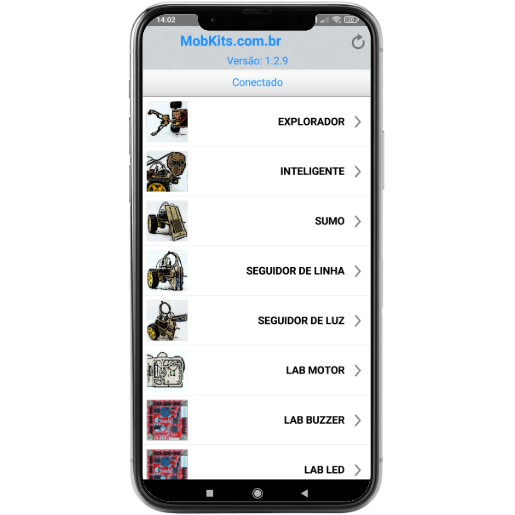
Tela Inicial: Selecione Seguidor de Linha.
9 Tela inicial
Nesta tela podemos iniciar o controle, mas precisamos ativá-los.
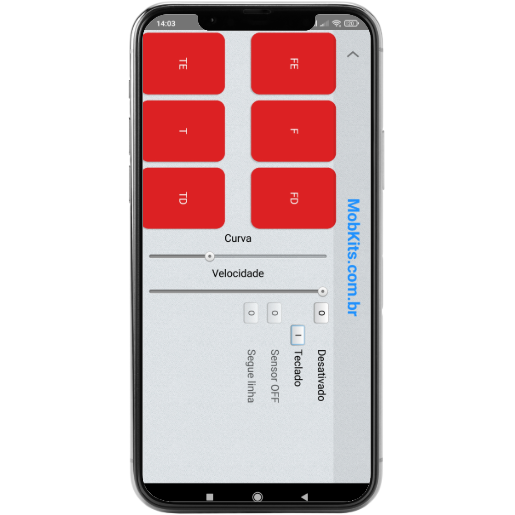
Tela Seguidor de Linha.
10 Ativação o controle básico
Ao clicar no botão ao lado de Desativado ele mudará para Ativado. Nesta posição o robô estará pronto para ser controlado como o robô básico.
Para controlar o robô não esqueça de colocar o smartphone ou tablet na posição horizontal.
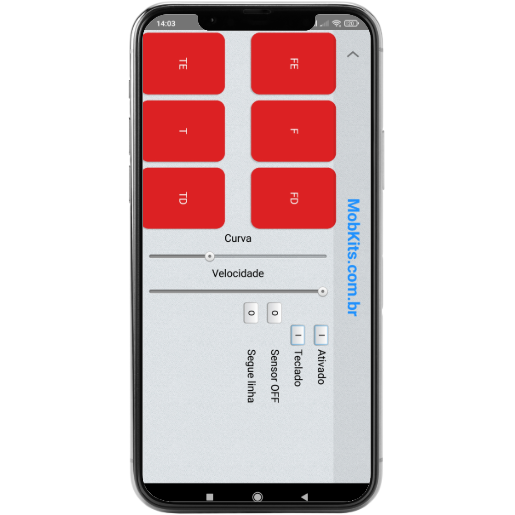
Tela Seguidor de Linha
11 Preparando uma pista
No modo seguidor de linha o robô deve ser colocado em cima de uma pista com um trajeto preto, que pode ser construída, por exemplo, com uma fita preta em qualquer superfície lisa. Evitar apenas locais altos, pois sua montagem poderá cair.
Na imagem a seguir apresentamos um sugestão de trajeto, mas sua criatividade é o limite!
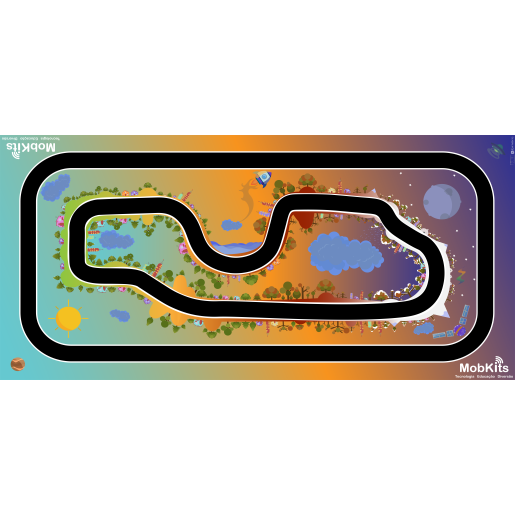
Exemplo de trajeto
12 Ativação do modo Segue linha
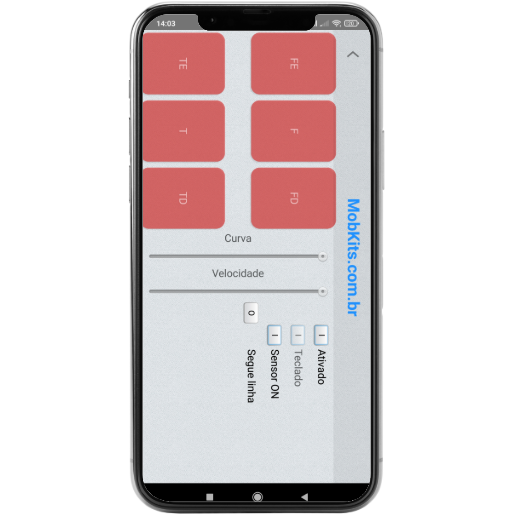
Certifique-se que na última opção esteja aparecendo Segue linha,
caso esteja aparecendo Rejeita linha basta tocar no botão para selecionar Segue linha.
Para ativar os sensores toque no botão Sensor OFF.
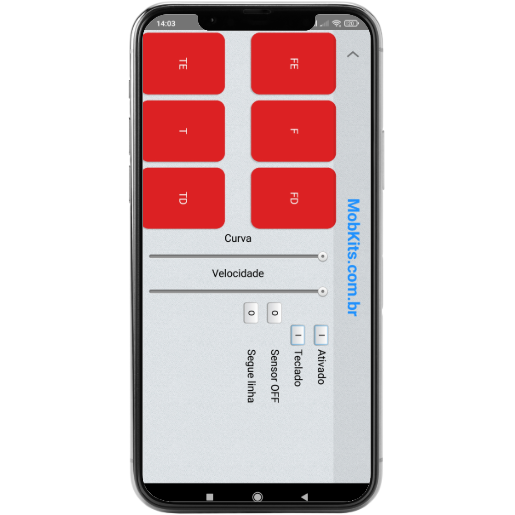
Tela Seguidor de Linha.
Nesta etapa aparecerá Sensor ON ao lado do botão, conforme imagem abaixo.
Agora os sensores estão ativados e seu robô deverá se movimentar seguindo o trajeto.
Tela Seguidor de Linha.
Caso tenha alguma dúvida relativa ao funcionamento assista este vídeo.
Na parte final explicamos como ajustar os sensores e como testar seu robô.
13 Ativação do modo rejeita linha
Certifique-se que na última opção esteja aparecendo Rejeita linha,
caso esteja aparecendo Segue linha basta tocar no botão para selecionar Rejeita linha.
Para ativar os sensores toque no botão Sensor OFF.
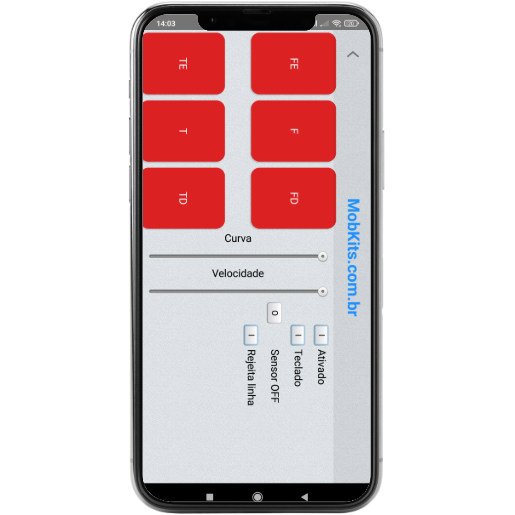
Tela Seguidor de Linha.
Nesta etapa aparecerá Sensor ON ao lado do botão, conforme imagem abaixo.
Agora os sensores estão ativados e seu robô deverá se movimentar indo para frente enquanto o chão refletir luz.
Quando o chão não refletir luz ele deverá recuar.

Tela Seguidor de Linha.
Caso tenha alguma dúvida relativa ao funcionamento assista este vídeo.
Na parte final explicamos como ajustar os sensores e como testar seu robô.